On this page I present some example projects from both my private and professional life which include hardware and software development in different areas of engineering. I am experienced in CAD design, 3D printing, soldering and PCB design, microcontrollers, as well as actuation and sensing. I like overseeing projects from all the different perspectives including control software, hardware, data processing algorithms and automation.
Optoacoustic mesoscope
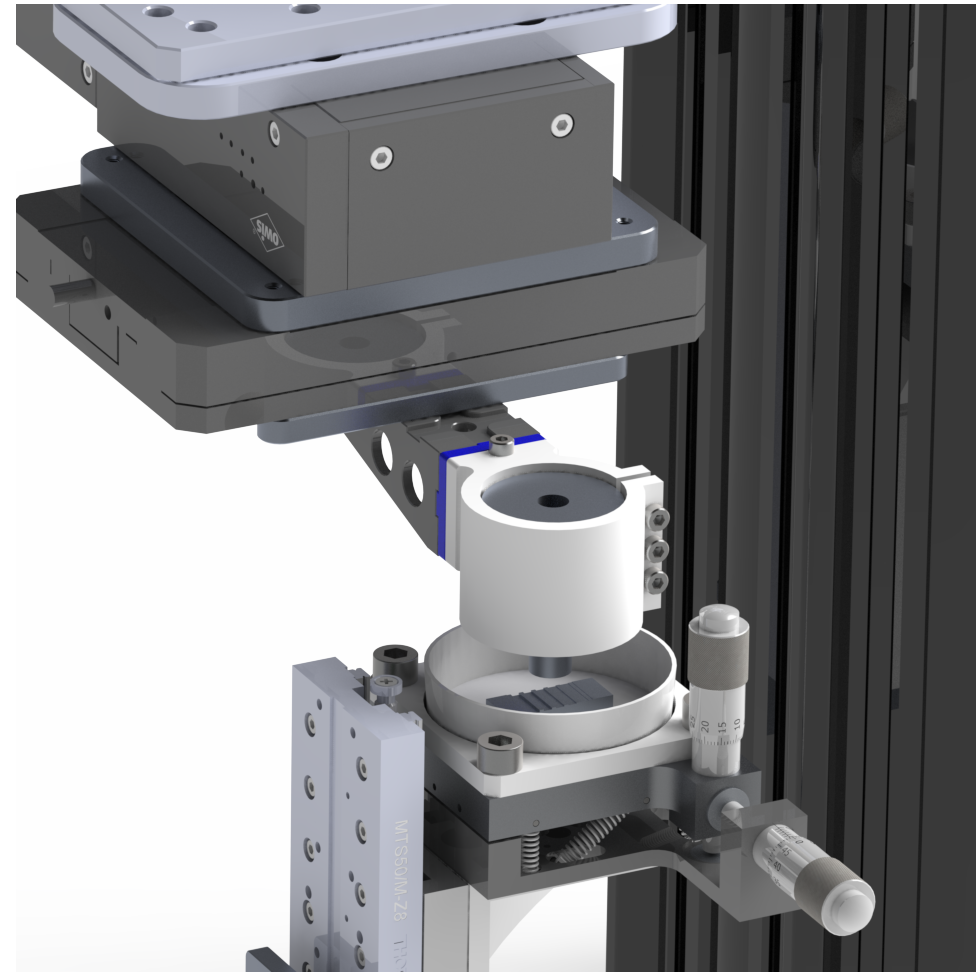
One of the main goals during my doctorate at ETH Zurich was the development of an optoacoustic mesoscope capable of performing multi-wavelength scans in short time. Based on a spherically focused ultrasound transducer with coaxially aligned illumination through a central hole, images of areas spanning up to 50 mm by 50 mm can be acquired in minutes. The resolution of the system is limited by acoustic diffraction and reaches down to 20 micrometer lateral and 15 micrometer axial direction. The system outperforms several state of the art systems in terms of scan speed and accuracy. It proved itself as a flexible platform and with the developed scan head it can be quickly adapted to scanning acoustic microscopy or optical resolution optoacoustic microscopy.
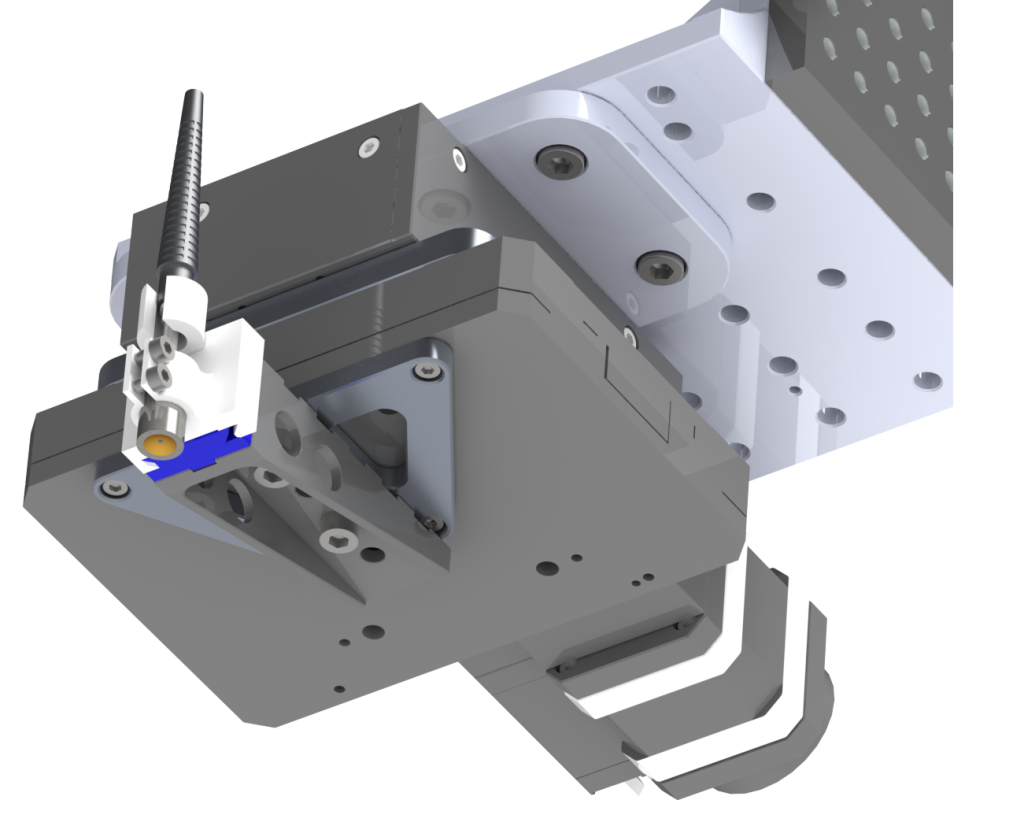
Burst mode trigger scheme
The core of the scanning approach is defined by a burst mode triggering scheme. A microcontroller (Teensy 3.6) directly reads out the quadrature position encoder of the fast moving stage to continuously monitor the stage position. During the scanning procedure we want to acquire an optoacoustic waveform after a defined incremental movement and therefore trigger the nanosecond pulsed laser at each step followed by the acquisition of the back-propagating optoacoustic waveform. If required, at each individual scanning grid position, multiple wavelengths can be acquired allowing multi-spectral optoacoustic images within a single mechanical overfly scan. Read more…
Screening for absorbing proteins
The system was slightly modified to screen for absorbing proteins expressed by bacterial colonies plated on agar. The target proteins could potentially be used as genetically encoded indicators for e.g. calcium ions or glutamate allowing functional read-outs through optoacoustic imaging at depths beyond the diffraction limit imposed onto optical imaging techniques. To do so, the optoacoustic platform was co-registered with a fluorescence wide-field imaging system at an accuracy reaching the pixel size of the fluorescence images. The co-calibration procedure was fully automated and can be performed within less then ten minutes. After acquiring an optical image of the target, bacterial colonies are identified through circle detection, the fastest path between them is found by finding an approximate solution to the traveling salesmen problem, and they are probed individually to acquire averaged, multi-spectral information at high speed. Read more…
Scanning acoustic microscopy
The same system can be used as a scanning acoustic microscope. Thereby the sensitive element is excited by a short high voltage pulse resulting in the emission of a high frequency ultrasound wave. While the wave travels through the tissue, it interacts with acoustic boundaries resulting in backpropagation of the acoustic waves to the sensor where they are now detected. By acquiring those A scans at multiple positions spanning the field of view, pulse echo images can be acquired for biomedical imaging or nondestructive testing. Read more…
If you are interested in any of the topics covered by the thesis, you can find an open access version of it in the ETH research collection.
Hand exoskeleton
During my master thesis, I worked with the rehabilitation engineering laboratory towards the development of a hand exoskeleton to assist stroke patients during activities of a daily living. By improving and testing different actuation approaches based on pneumatic, hydraulic, or cable driven approaches, I explored the best way to actuate the finger mechanisms from a remote location (most typically a backpack worn by the user). The work included extensive testing of different approaches, soldering driver electronics, designing sensors and control algorithms, and employing the best performing version into the existing prototype.
Remote location of actuation unit
The basis of the developed system is the principle of remote actuation. Similar to the human hand, where the actuating muscles are positioned in the forearm to save weight and space on the hand itself, we located batteries, motors, and controllers in a backpack and transmitted the mechanical power to the hand by means of Bowden cables allowing great reduction of weight and volume on the hand part. Read more…
Remote sensing
Due to practical considerations, sensors and the required electronics should not be positioned at the hand module itself. By using another rope guided within a thin metal tubing, we built a bending angle sensor which allows accurate estimation of the overall bending angle along arbitrary routes. In the exoskeleton, this bending angle sensor is guided alongside the force transmitting Bowden tubes to allow accurate bending angle estimation. With this information and cable tension sensors at the backpack, we implemented a feed forward force control algorithm.
Links
* Project description
* Description of developed prototype
* Paper about the comparison of different actuation approaches
Music box
A fully automated mobile disco aka. Gabberzelle built for festivals and other events born and raised in Munich. Featuring 1.2 m x 1.2 m it provides the visitor with a fully synced experience of light, music, and fog. The LED panel used for the inside illumination is custom made based on standard LED stripes. The controller was self built and controller software was written from scratch in C++ including an automatic piecewise FFT to analyze the frequency content of the played songs. Afterwards, the spectral information is used to control the light of the LED panel where different effects can be projected onto the 900 element LED panel. The code is still under development including user interface for simplified preview of playlists, light effects and spectral information. So far the code is not public but feel free to contact me if you want a preview.
